
قطعات دستگاه CNC ( چوب – سنگ – فوم – برش هواگاز – فلز تراش – صنایع رباتیک و غیره ) در شرکت صنعتی تن زره
همه دستگاه های CNC اجزا و قطعات مشابهی دارند که شرکت تن زره بورس قطعات cnc می باشد.
قطعات دستگاه های CNC شامل:
- قطعات مکانیکی
- شاسی (استراکچر یا بدنه دستگاه)
- موتور های حرکتی شامل سروموتورها و استپ موتورها
- مکانیزم حرکتی شامل بال اسکرو، چرخ دنده و شانه، تسمه تایم
- ریل و واگن
- اسپیندل
- سیستم روغن کاری
- قطعات واحد کنترل
- کنترولر مرکزی
- نرم افزار رابط
- درایور موتور
- سیستم اندازه گیری
- اینتورتر اسپیندل موتور
- قطعات واحد برق و قدرت
- تابلو برق
- فیوز های حفاظتی
- کنتاکتور
- رله
- محافظ کابل (انرژی گارد)
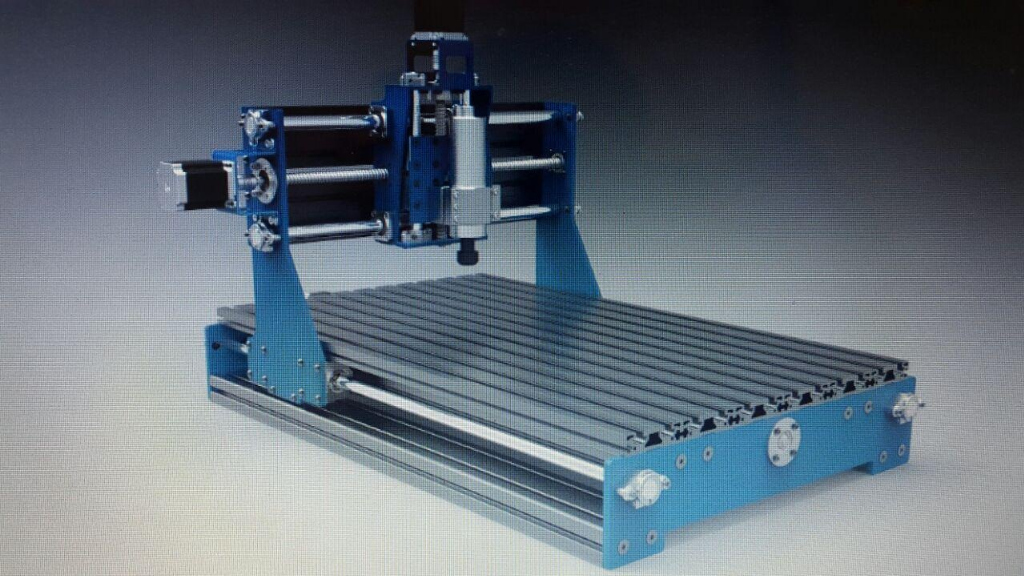
شاسی cnc
مهم ترین قسمت دستگاه cnc بدنه شاسی(استراکچر) می باشد.
اجزای دیگر ماشین شامل ریل و واگن ، موتور ها ، بال اسکرو ، دنده شانه و غیره بر روی یک بدنه نصب میگردند .
در شاسی دستگاه های CNC چوب از نظر متریال و جنس به دو نوع تقسیم می گردد :
۱- شاسی چدنی ۲- شاسی فولادی
موتور های حرکتی:
دستگاه های CNC از دو نوع موتور حرکتی استفاده می نمایند:
۱- سرو موتور ۲- استپ موتور
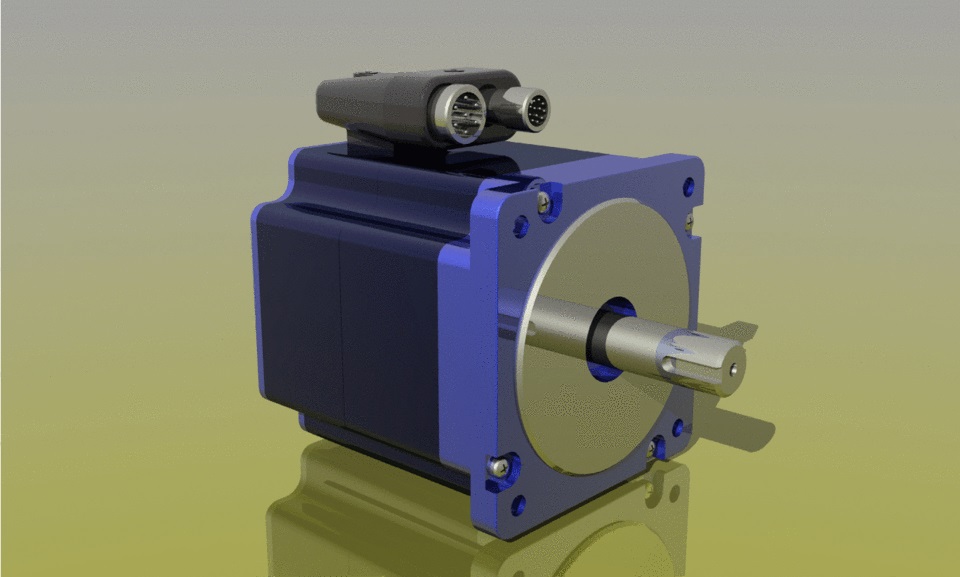
سروموتور :
سروموتور ( Servomotor یا موتور کنترل Control motor):
از موتورهای الکتریکی است که با هدف بکارگیری در سیستمهای کنترل فیدبک طراحی شده است.
لختی (اینرسی) در این موتورها پایین می باشد و در نتیجه تغییر سرعت در این موتورها بسیار سریع است.
به طور معمول قطر این موتورها کم می باشد اما طول آنها زیاد است.
سرو موتور یک محور (shaft) خروجی دارد. این محور قادر است تا در یک موقعیت و زاویه ای خاص با ارسال سیگنال رمزی قرار گیرد.
چگونگی حرکت و موقعیت های زاویه ای این محور خروجی توسط دسته ای از سیگنالهای رمزی که برای سیم کنترل آن تعریف می شود کنترل می شود.
برای طول مدت زمانیکه یک سیگنال فعال بوده و یک پالس برروی خط ورودی آن قرار دارد این محور خروجی در موقعیت خاص زاویه ای که مختص آن سیگنال است قرار می گیرد و با تغییر سیگنال رمزی موقعیت زاویه ای تغییر می کند.
سرو موتورها در صنایع رباتیک وتولیدات صنعتی مانند موتورهای کنترل کننده هواپیماها کنترل موقعیت سطوح ( مانند آسانسورها و … ) و… کاربرد وسیعی دارند .
در کاربردهای مـدرن ، واژه سرو یا مکانیــسم سرو به یک سیستم کنـترلی فیدبک که متغیر کنترل شونده ، موقعیت یا مشتق موقعیت مکانیکی به عنوان سرعت و شتاب است، محدود می شود.
یک سیستم کنترلی فیدبک ، سیـستم کنـترلی است که به نگهـداشتن یک رابطه مفروض بین یک کمیت کنـترل شده و یک کمیـت مرجع ، با مقایسه توابع آنها و اسـتفاده از اختلاف به عنوان وسیله کنترل منجر می شود.
سیستم کنـترلی فیدبک الکتریکی ، عموما برای کار به انرژی الکتـریکی تکیه می نماید
ویژگی های مهم مورد نیاز برای چنین کنترلی عبارتند از :
- پاسخ سریع
- دقت زیاد
- کنترل بدون مراقبت
- کارکرد از راه دور
موارد مورد نیاز عبارتست از :
- وسیله نمایان سازی خطا
- تقویت کننده
- وسیله اصلاح خطا
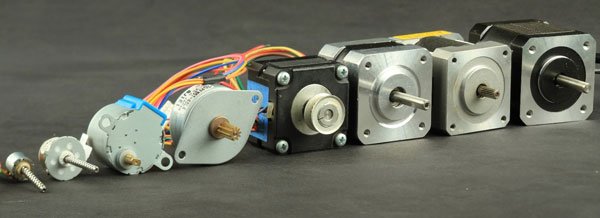
استپ موتور :
استپ موتور ( Step Motor - موتور پله ای یک موتور براشلس -Brushless ) الکتریکی DC است که یک دور کامل ( ۳۶۰ درجه ) را به تعدادی پله یا استپ مساوی تقسیم می کند.
کنترل موقعیت موتور پله ای برای رفتن به یک پله خاص یا ماندن در آن پله بدون استفاده از سیستم فیدبک است و از دقت بالای این موتور ها است.
در هر پله یا استپ به میزان خاصی بر حسب درجه دوران می کنند ، به عنوان مثال محور استپ موتور ۲۰۰ استپ در هر استپ ۱/۸ درجه دوران می نماید.
موتور های DC جاروبک دار هر زمان که به ترمینال های آنها ولتاژ اعمال شود به حرکت پیوسته ادامه می دهند.
استپ موتور ها فاقد جاروبک یا براشلس هستند و از مشخصات اصلی که آنها را از سایر انواع موتور ها متمایز می نماید این است که با اعمال پالس به ترمینال های آن ( عموما پالس های موج مربعی ) موقعیت شفت یا محور موتور به میزان مشخص و از پیش تعیین شده ای ( در هنگام تولید موتور ) دوران می نماید. هر پالس به میزان مشخصی زاویه محور را تغییر می دهد.
در استپ موتور ها اطراف هسته مرکزی چندین الکترومگنت دندانه دار قرار دار د و در مرکز آن نیز یک سیلندر آهنی دندانه دار ( به شکل چرخ دنده ) وجود دارد.
الکترو مگنت ها بوسیله ی یک کنترلر خارجی ( به عنوان مثال میکرو کنترلر ) فعال و غیر فعال می گردد.
با برانگیخته شدن اولین الکترومگنت ، سیلندر مرکزی دندانه دار شروع به چرخش می کند تا دندانه های روی سیلندر دقیقا مقابل دندانه های اولین الکترو مگنت قرار بگیرند.
( به خاطر داشته باشید در این حالت دندانه های سیلندر مرکزی فقط با دندانه های اولین الکترومگنت مطابقت می نماید و با دندانه های سایر الکترومگنت ها انطباق ندارد. )
با فعال شدن الکترو مگنت بعدی و غیر فعال شدن اولین الکترومگنت ، دندانه های روی روتر ( Rotor ) با دندانه های الکترومگنت بعدی منطبق می شود به هر یک از این چرخش ها یک پله یا یک استپ می گویند و بدین شکل یک استپ به جلو یا عقب حرکت می کند.
با ادامه این فرآیند موتور به چرخش ادامه می دهد. استپ موتور ها می توانند به این شکل زوایای دقیقی حرکت کنند.
دیدگاههای بازدیدکنندگان
 نیما
نیما
1152 روز پیشبرای خرید قطعات دستگاه CNC با توجه به مدل دستگاه باید اقدام کرد ،هر قطعه ای رو نمیشه رو هر دستگاهی نصب کرد
ارسال پاسخ امین
امین
1138 روز پیشبا قطعات دستگاه CNC بیشتر آشنا شدم ممنون از سایت خوبتون
ارسال پاسخ lily
lily
1138 روز پیشمطلب قطعات دستگاه cnc مفید بود ممنون از تن زره.
ارسال پاسخ